Gnutti Carlo GroupJuly 2025 - Present
Industrial Vision System Design
Lead Vision Systems Engineer
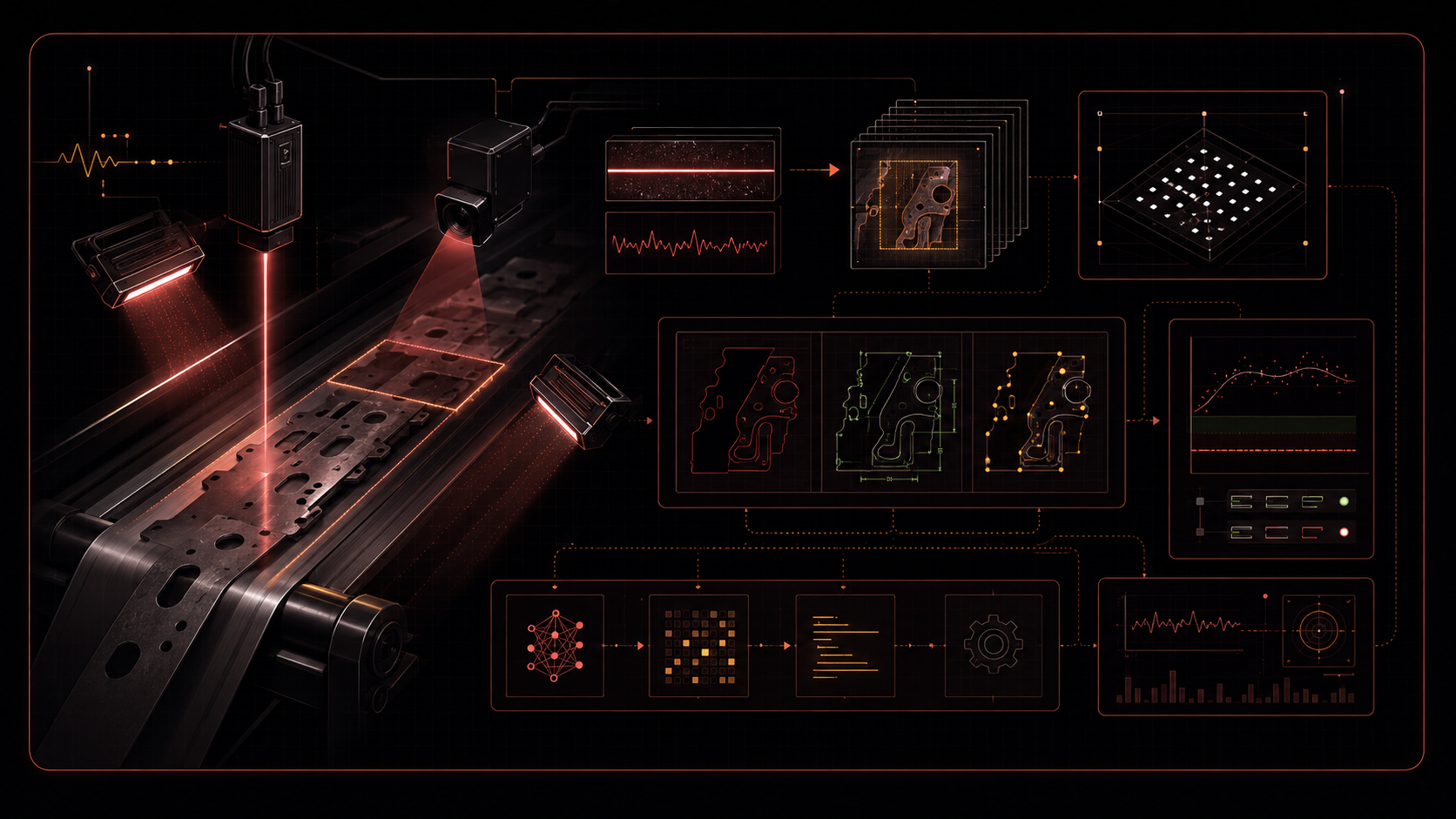
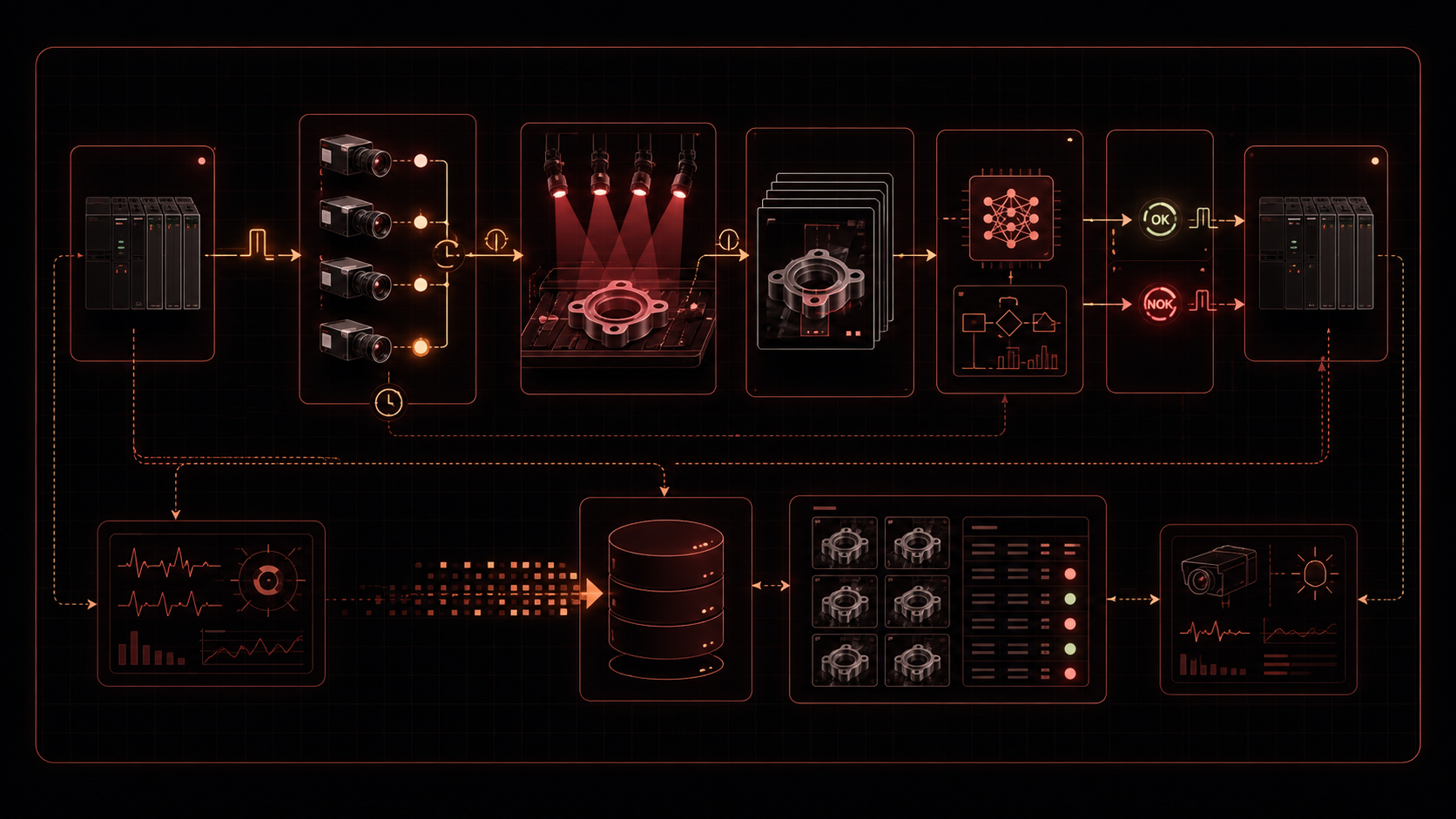
Built the architecture and leading the team for a PLC-driven production vision system: retrofitting vision hardware in the existing production line, synchronized camera triggering, image acquisition, AI decision flow, traceability storage, commissioning checks, and support-ready diagnostics, designed methods for measurement system analysis (MSA).
PLC handshakeGigE VisionMulti-camera acquisitionAI inspectionTraceabilityCommissioningMeasurement System Analysis (MSA)
View case study